For many of us, the most dangerous part of our day is our commute—driving a car or bicycle, riding as a passenger, or even walking on a sidewalk. Globally, more than 1.25 million people are killed on roads each year, and as many as 50 million are injured. Sadly, automobile crash-related deaths are the leading cause of death for people between 15 and 29 years old.
 Graphic courtesy of Metrocosm
Graphic courtesy of Metrocosm
At first glance, this may look like a population-density map, but it’s really a map of 10 years of fatalities on roads in the U.S. and the most frustrating part is this is a solvable problem. (Disclaimer: I studied engineering, and engineers view all problems as solvable.)
Sweden understands what it will take to eliminate traffic fatalities and has launched Vision Zero. The program’s mission can be summarized in one sentence: No loss of life is acceptable. Cities across the U.S. are taking part in Vision Zero as well.
Today, we have the technology to vastly reduce the number of accidents and casualties on our streets. There have been major advancements in mapping, sensors, positioning, GPU processing, artificial intelligence and safety systems compatible with our vehicles to make passengers safer. But there’s still room to improve.
One of the biggest challenges in vehicle safety is reliable and updated location information. This starts with navigation systems having a very detailed basemap of the existing environment. It has to be accurate, reliable and scaled to cover all roads and routes a vehicle can travel. This basemap is an inventory of all the clues a vehicle needs to safely navigate and determine its position on that map, a phenomenon known as “localization.”
These systems need to be trained, very similar to humans as they learn to drive and safely navigate. As we drive, we are processing a huge amount of information and simultaneous events. We take for granted how difficult this is. Training, learning and safety all start with the basemap, which is created using detailed measurements.
 Image courtesy of Mapillary
Image courtesy of Mapillary
These road markings are the type of clues an autonomous vehicle uses to localize. With remote sensing, we can create a detailed inventory, or basemap, of all these features.
We’ve all seen amazing satellite images in the news collected by Maxar. Here’s the thing: These are much, much more than pretty pictures. They are visual manifestations of measurements taken by very sophisticated satellites in space. When you see an image in the news, it only looks that way because it’s been processed in a method optimized for human eyeballs. But this is not the best way to process an image for a robot, like an autonomous vehicle, or for an algorithm running on code in that autonomous vehicle.
Maxar has collected the entire planet at high resolution, effectively mapping out every road on Earth. And now, our goal is to update them accurately and rapidly. We do this by using very accurate sensors in space. Our satellites orbit the Earth at 17,000 mph. As they collect data, they are accounting for this orbit speed, the Earth’s rotation and refraction in the atmosphere.
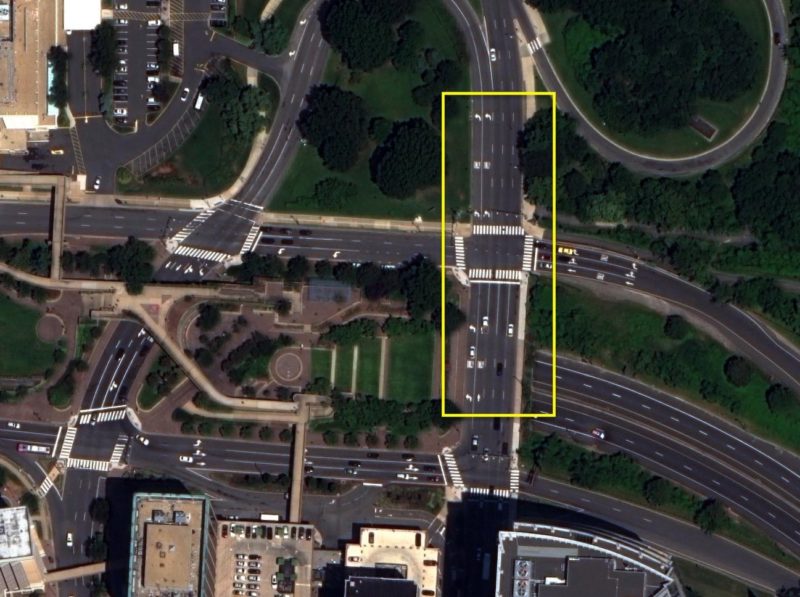
The concept of collecting and measuring this from space using a satellite platform is mind-blowing. But with the precise technology in a satellite like WorldView-3, it is feasible. And, as it turns out, incredibly scalable and economical. Here’s that same road, as seen from space:
 ©Maxar Technologies
©Maxar Technologies
Using algorithms to detect and extract features, we can create a high-definition map from space. To illustrate, here is another intersection.
 ©Maxar Technologies
©Maxar Technologies
And that same intersection, as we start extracting road features:
 ©Maxar Technologies
©Maxar Technologies
This serves as a comprehensive, accurate basemap to help a vehicle as it navigates. The sensors on the vehicle localize it within this map and can then focus on looking for potential hazards, such as other vehicles and pedestrians. In other words, this high-definition map is a way for a vehicle to “cheat” so it can focus on the real-time environment.
Sensors have “horizons” or limitations on how far from the car they can detect features. With features extracted from a high-definition map, the vehicle’s sensors can see beyond the horizon and anticipate the road markings around the block, around the neighborhood or even across town. With smarter vehicles, passengers and our communities are safer. We don’t have to settle for fatalities as the cost of our transportation system.
 ©Maxar Technologies
©Maxar Technologies
As this technology evolves, the world will go through a massive transformation – powered by commercial innovation. Maxar is looking forward to partnering with automotive innovators to build a better world as autonomous vehicles become more prevalent in our communities.
See how high-definition maps and geospatial data are fueling safer navigation systems.